ដៃមនុស្សយន្ត SCARA – ដៃមនុស្សយន្តសហការ Z-Arm-2442B



ប្រភេទសំខាន់
ដៃមនុស្សយន្តឧស្សាហកម្ម / ដៃមនុស្សយន្តសហការ / ឧបករណ៍ក្តាប់អគ្គិសនី / ឧបករណ៍បញ្ជាឆ្លាតវៃ / ដំណោះស្រាយស្វ័យប្រវត្តិកម្ម
ពាក្យសុំ
កូបូត SCIC Z-Arm គឺជាមនុស្សយន្តសហការ 4 អ័ក្សទម្ងន់ស្រាល ជាមួយនឹងម៉ូទ័រជំរុញដែលភ្ជាប់មកជាមួយ ហើយលែងត្រូវការឧបករណ៍កាត់បន្ថយដូច scara ប្រពៃណីផ្សេងទៀតទៀតហើយ ដែលកាត់បន្ថយថ្លៃដើមបាន 40%។ កូបូត SCIC Z-Arm អាចអនុវត្តមុខងារនានា រួមមាន ប៉ុន្តែមិនកំណត់ចំពោះការបោះពុម្ព 3D ការគ្រប់គ្រងសម្ភារៈ ការផ្សារ និងការឆ្លាក់ឡាស៊ែរ។ វាអាចធ្វើអោយប្រសើរឡើងយ៉ាងខ្លាំងនូវប្រសិទ្ធភាព និងភាពបត់បែននៃការងារ និងផលិតកម្មរបស់អ្នក។
លក្ខណៈពិសេស

ភាពជាក់លាក់ខ្ពស់
សមត្ថភាពធ្វើម្តងទៀតបាន
±0.02មម
បន្ទុកធំ
៥គីឡូក្រាម
ចន្លោះដៃធំ
អ័ក្ស JI 220mm
អ័ក្ស J2 200mm
តម្លៃប្រកួតប្រជែង
គុណភាពកម្រិតឧស្សាហកម្ម
Cតម្លៃប្រកួតប្រជែង
ផលិតផលពាក់ព័ន្ធ



ប៉ារ៉ាម៉ែត្រលក្ខណៈបច្ចេកទេស
SCIC Z-Arm 2442B ត្រូវបានរចនាឡើងដោយ SCIC Tech វាជាមនុស្សយន្តសហការទម្ងន់ស្រាល ងាយស្រួលសរសេរកម្មវិធី និងប្រើប្រាស់ គាំទ្រ SDK។ លើសពីនេះ វាក៏គាំទ្រការរកឃើញការប៉ះទង្គិចគ្នា ពោលគឺវានឹងឈប់ដោយស្វ័យប្រវត្តិនៅពេលប៉ះមនុស្ស ដែលជាកិច្ចសហការឆ្លាតវៃរវាងមនុស្ស និងម៉ាស៊ីន ហើយសុវត្ថិភាពក៏ខ្ពស់។
| ដៃមនុស្សយន្តសហការ Z-Arm 2442B | ប៉ារ៉ាម៉ែត្រ |
| ប្រវែងដៃអ័ក្ស 1 | ២២០មម |
| មុំបង្វិលអ័ក្ស 1 | ±៩០° |
| ប្រវែងដៃអ័ក្ស 2 | ២០០មម |
| មុំបង្វិលអ័ក្ស 2 | ±១៦៤° (ជាជម្រើស៖ ១៥-៣៤៥ដឺក្រេ) |
| ចលនាអ័ក្ស Z | ២៤០ (កម្ពស់អាចប្ដូរតាមបំណងបាន) |
| ជួរបង្វិលអ័ក្ស R | ±១០៨០° |
| ល្បឿនលីនេអ៊ែរ | ១៦០០ ម.ម/វិនាទី (បន្ទុក ៤ គីឡូក្រាម) |
| សមត្ថភាពធ្វើម្តងទៀតបាន | ±0.02មម |
| បន្ទុកស្តង់ដារ | ៤គីឡូក្រាម |
| បន្ទុកអតិបរមា | ៥គីឡូក្រាម |
| កម្រិតនៃសេរីភាព | 4 |
| ការផ្គត់ផ្គង់ថាមពល | 220V/110V50-60HZ សម្របខ្លួនទៅនឹងថាមពលកំពូល 48VDC 200W |
| ការទំនាក់ទំនង | អ៊ីសឺរណិត |
| សមត្ថភាពពង្រីក | ឧបករណ៍បញ្ជាចលនារួមបញ្ចូលគ្នាដែលភ្ជាប់មកជាមួយផ្តល់នូវការពង្រីក 24 I/O + នៅក្រោមក្លៀក |
| អ័ក្ស Z អាចត្រូវបានប្ដូរតាមបំណងក្នុងកម្ពស់ | ០.១ម-០.៥ម |
| ការបង្រៀនអូសអ័ក្ស Z | / |
| ចំណុចប្រទាក់អគ្គិសនីត្រូវបានបម្រុងទុក | ការកំណត់រចនាសម្ព័ន្ធស្តង់ដារ៖ ខ្សែ 24*23awg (មិនមានរបាំង) ពីបន្ទះរន្ធតាមរយៈគម្របដៃខាងក្រោម ជាជម្រើស៖ បំពង់បូមធូលី φ4 ចំនួន 2 ឆ្លងកាត់បន្ទះរន្ធ និងគែម |
| ឧបករណ៍ក្តាប់អគ្គិសនី HITBOT ដែលឆបគ្នា | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| ពន្លឺដកដង្ហើម | / |
| ជួរនៃចលនាដៃទីពីរ | ស្តង់ដារ៖ ±១៦៤° ជម្រើស៖ ១៥-៣៤៥ដឺក្រេ |
| គ្រឿងបន្ថែមស្រេចចិត្ត | / |
| ប្រើប្រាស់បរិស្ថាន | សីតុណ្ហភាពព័ទ្ធជុំវិញ៖ ០-៤៥°C សំណើម៖ 20-80% RH85 (មិនសាយសត្វ) |
| ច្រកបញ្ចូលឌីជីថល I/O (ដាច់ដោយឡែក) | ការពង្រីកកំភួនដៃ ៩+៣+ (ជាជម្រើស) |
| ច្រក I/O ទិន្នផលឌីជីថល (ដាច់ដោយឡែក) | ការពង្រីកកំភួនដៃ ៩+៣+ (ជាជម្រើស) |
| ច្រកបញ្ចូល/បញ្ចេញអាណាឡូក (4-20mA) | / |
| ច្រក I/O ទិន្នផលអាណាឡូក (4-20mA) | / |
| កម្ពស់ដៃរ៉ូបូត | ៦៨៣មម |
| ទម្ងន់ដៃរ៉ូបូត | ទម្ងន់សុទ្ធ 27 គីឡូក្រាម ប្រវែងដងខ្លួន 240 មីលីម៉ែត្រ |
| ទំហំមូលដ្ឋាន | ២៥០មម*២៥០មម*១៥មម |
| ចម្ងាយរវាងរន្ធជួសជុលមូលដ្ឋាន | 200mm * 200mm ជាមួយវីស M8 * 20 ចំនួនបួន |
| ការរកឃើញការប៉ះទង្គិច | √ |
| ការបង្រៀនអូស | √ |
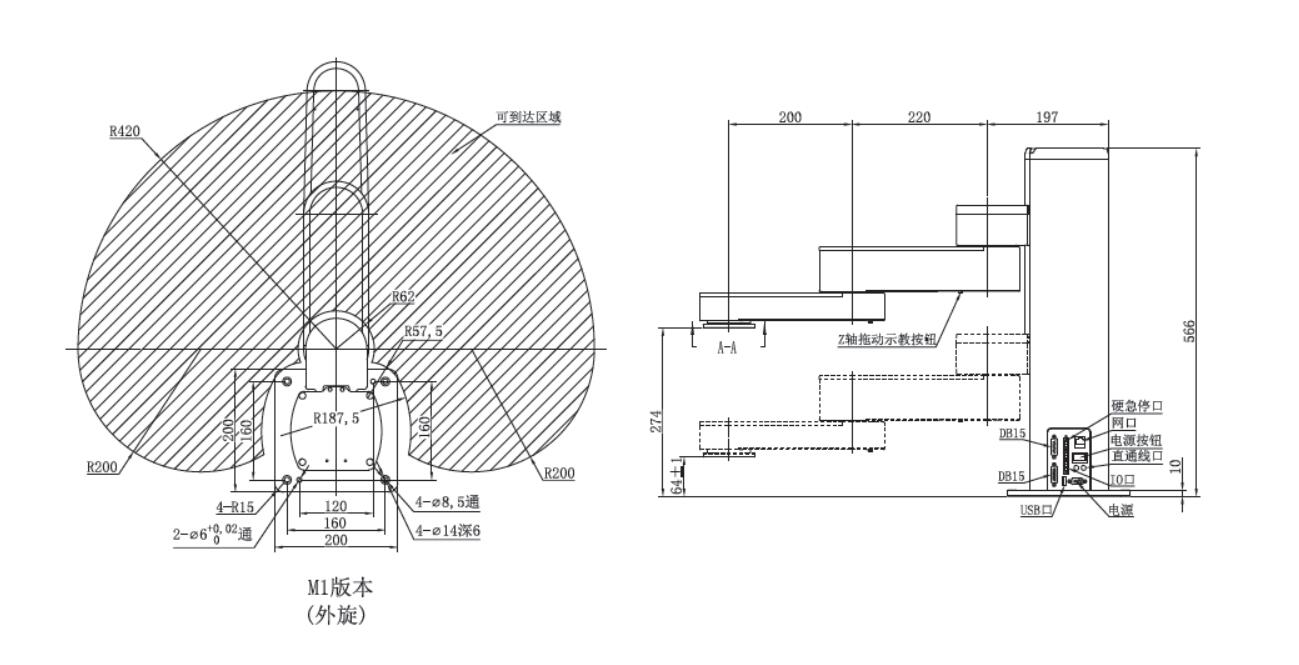
ជួរចលនា កំណែ M1 (បង្វិលចេញក្រៅ)
ការណែនាំអំពីចំណុចប្រទាក់

ចំណុចប្រទាក់ដៃមនុស្សយន្ត Z-Arm 2442 ត្រូវបានដំឡើងនៅ 2 ទីតាំង គឺចំហៀងនៃមូលដ្ឋានដៃមនុស្សយន្ត (កំណត់ជា A) និងផ្នែកខាងក្រោយនៃដៃចុង។ បន្ទះចំណុចប្រទាក់នៅចំណុច A មានចំណុចប្រទាក់កុងតាក់ថាមពល (JI) ចំណុចប្រទាក់ផ្គត់ផ្គង់ថាមពល 24V DB2 (J2) ទិន្នផលទៅច្រក I/O របស់អ្នកប្រើប្រាស់ DB15 (J3) ច្រក I/O បញ្ចូលរបស់អ្នកប្រើប្រាស់ DB15 (J4) និងប៊ូតុងកំណត់រចនាសម្ព័ន្ធអាសយដ្ឋាន IP (K5) ច្រក Ethernet (J6) ច្រកបញ្ចូល/បញ្ចេញប្រព័ន្ធ (J7) និងរន្ធខ្សែត្រង់ចំនួន 4 ស្នូលចំនួនពីរ J8A និង J9A។
ការប្រុងប្រយ័ត្នជាមុន
១. និចលភាពនៃបន្ទុក
ចំណុចកណ្តាលទំនាញនៃបន្ទុក និងជួរបន្ទុកដែលបានណែនាំជាមួយនឹងនិចលភាពនៃចលនាអ័ក្ស Z ត្រូវបានបង្ហាញក្នុងរូបភាពទី 1។

រូបភាពទី 1 ការពិពណ៌នាអំពីបន្ទុកស៊េរី XX32
២. កម្លាំងប៉ះទង្គិច
កម្លាំងកេះនៃការការពារការប៉ះទង្គិចសន្លាក់ផ្ដេក៖ កម្លាំងនៃស៊េរី XX42 គឺ 40N។
៣. កម្លាំងខាងក្រៅអ័ក្ស Z
កម្លាំងខាងក្រៅនៃអ័ក្ស Z មិនត្រូវលើសពី 120N ទេ។

រូបភាពទី 2
៤. កំណត់ចំណាំសម្រាប់ការដំឡើងអ័ក្ស Z ដែលបានប្ដូរតាមបំណង សូមមើលរូបភាពទី 3 សម្រាប់ព័ត៌មានលម្អិត។

រូបភាពទី 3
ចំណាំព្រមាន៖
(1) សម្រាប់អ័ក្ស Z ដែលបានប្ដូរតាមបំណងជាមួយនឹងចលនាធំ ភាពរឹងរបស់អ័ក្ស Z ថយចុះនៅពេលដែលចលនាកើនឡើង។ នៅពេលដែលចលនាអ័ក្ស Z លើសពីតម្លៃដែលបានណែនាំ អ្នកប្រើប្រាស់មានតម្រូវការភាពរឹង ហើយល្បឿនគឺ >50% នៃល្បឿនអតិបរមា វាត្រូវបានណែនាំយ៉ាងខ្លាំងឱ្យដំឡើងឧបករណ៍ទ្រទ្រង់នៅពីក្រោយអ័ក្ស Z ដើម្បីធានាថាភាពរឹងរបស់ដៃមនុស្សយន្តបំពេញតាមតម្រូវការក្នុងល្បឿនលឿន។
តម្លៃដែលបានណែនាំមានដូចខាងក្រោម៖ ស៊េរី Z-ArmXX42 អ័ក្ស Z រាងជារង្វង់ >600mm
(2) បន្ទាប់ពីការបង្កើនចលនាអ័ក្ស Z បញ្ឈរនៃអ័ក្ស Z និងមូលដ្ឋាននឹងត្រូវបានកាត់បន្ថយយ៉ាងខ្លាំង។ ប្រសិនបើតម្រូវការបញ្ឈរយ៉ាងតឹងរ៉ឹងសម្រាប់អ័ក្ស Z និងឯកសារយោងមូលដ្ឋានមិនអាចអនុវត្តបានទេ សូមពិគ្រោះជាមួយបុគ្គលិកបច្ចេកទេសដោយឡែកពីគ្នា។
៥. ហាមដោតខ្សែភ្លើងចូលដោយប្រើខ្សែភ្លើងក្តៅ។ សញ្ញាព្រមានបញ្ច្រាស់ពេលដែលបង្គោលវិជ្ជមាន និងអវិជ្ជមាននៃការផ្គត់ផ្គង់ថាមពលត្រូវបានផ្តាច់។
៦. កុំចុចដៃផ្ដេកនៅពេលបិទភ្លើង។

រូបភាពទី ៤
អនុសាសន៍ឧបករណ៍ភ្ជាប់ DB15

រូបភាពទី 5
ម៉ូដែលដែលបានណែនាំ៖ ឈ្មោលស្រោបមាស ជាមួយសំបក ABS YL-SCD-15M ញីស្រោបមាស ជាមួយសំបក ABS YL-SCD-15F
ទំហំពិពណ៌នា៖ ៥៥មម * ៤៣មម * ១៦មម
(សូមមើលរូបភាពទី 5)
តុសម្រាប់កាន់ដៃរ៉ូបូតដែលឆបគ្នានឹងដៃរ៉ូបូត
| លេខម៉ូដែលដៃរ៉ូបូត | ឧបករណ៍ក្តាប់ដែលឆបគ្នា |
| XX42 T1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Z-EFG-30NM NMA ការបោះពុម្ព 3D អ័ក្សទី 5 |
| XX42 T2 | Z-EFG-50 ALL/Z-EFG-100 TXA |
ដ្យាក្រាមទំហំដំឡើងអាដាប់ទ័រថាមពល
ការកំណត់រចនាសម្ព័ន្ធ XX42 ការផ្គត់ផ្គង់ថាមពល 24V 500W RSP-500-SPEC-CN

ដ្យាក្រាមនៃបរិស្ថានប្រើប្រាស់ខាងក្រៅនៃដៃរ៉ូបូត

អាជីវកម្មរបស់យើង







