ស៊េរីឧបករណ៍ក្តាប់អគ្គិសនី HITBOT – ឧបករណ៍ក្តាប់អគ្គិសនីប្រភេទ Z-EFG-100 Y

ប្រភេទសំខាន់
ដៃមនុស្សយន្តឧស្សាហកម្ម / ដៃមនុស្សយន្តសហការ / ឧបករណ៍ក្តាប់អគ្គិសនី / ឧបករណ៍បញ្ជាឆ្លាតវៃ / ដំណោះស្រាយស្វ័យប្រវត្តិកម្ម
ពាក្យសុំ
ឧបករណ៍ក្តាប់មនុស្សយន្តស៊េរី Z-EFG របស់ SCIC មានទំហំតូចជាមួយនឹងប្រព័ន្ធ servo ដែលភ្ជាប់មកជាមួយ ដែលធ្វើឱ្យវាអាចសម្រេចបាននូវការគ្រប់គ្រងល្បឿន ទីតាំង និងកម្លាំងក្តាប់បានយ៉ាងច្បាស់លាស់។ ប្រព័ន្ធក្តាប់ទំនើបរបស់ SCIC សម្រាប់ដំណោះស្រាយស្វ័យប្រវត្តិកម្មនឹងអនុញ្ញាតឱ្យអ្នកបើកលទ្ធភាពថ្មីៗសម្រាប់ស្វ័យប្រវត្តិកម្មភារកិច្ចដែលអ្នកមិនធ្លាប់គិតថាអាចធ្វើទៅបាន។

លក្ខណៈពិសេស

· ស្នាមជ្រួញធំ
·កម្លាំងគៀបដែលអាចលៃតម្រូវបាន និងចលនាដែលអាចលៃតម្រូវបាន
·អាយុកាលវែង៖ វដ្តរាប់សិបលាន លើសពីក្រញ៉ាំខ្យល់
·ឧបករណ៍បញ្ជាដែលភ្ជាប់មកជាមួយ៖ ទំហំតូច ងាយស្រួលភ្ជាប់
·ការគ្រប់គ្រងឡានក្រុង EIA485
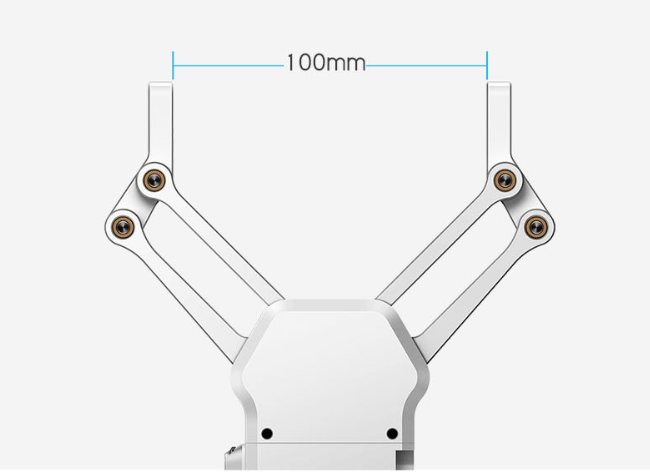
កម្លាំងតោងប្រវែង 100 ម.ម និងអាចលៃតម្រូវកម្លាំងតោងបាន
ដាច់សរសៃឈាមខួរក្បាលវែង
ប្រវែងសរុបរបស់វាឡើងដល់ 100 មីលីម៉ែត្រ
របៀបត្រួតពិនិត្យ
ការទំនាក់ទំនង ៤៨៥, ការគ្រប់គ្រងផ្លូវហាយវេ EIA៤៨៥
ដោត និងលេង
ងាយស្រួលប្រើជាមួយដៃមនុស្សយន្តសំខាន់ៗ
ឧបករណ៍បញ្ជាដែលភ្ជាប់មកជាមួយ
គ្របដណ្តប់លើផ្ទៃដីតូច ងាយស្រួលក្នុងការរួមបញ្ចូល។
ភាពត្រឹមត្រូវក្នុងការគ្រប់គ្រង
ភាពអាចធ្វើម្តងទៀតបាន៖ ±0.02មម
ការគៀបទន់
វាអាចគៀបវត្ថុដែលងាយខូច

● ការលើកកម្ពស់បដិវត្តន៍ក្នុងការជំនួសឧបករណ៍ក្តាប់ខ្យល់ដោយឧបករណ៍ក្តាប់អគ្គិសនី ដែលជាឧបករណ៍ក្តាប់អគ្គិសនីដំបូងគេដែលមានប្រព័ន្ធ servo រួមបញ្ចូលគ្នានៅក្នុងប្រទេសចិន។
● ការជំនួសដ៏ល្អឥតខ្ចោះសម្រាប់ម៉ាស៊ីនបង្ហាប់ខ្យល់ + តម្រង + សន្ទះបិទបើកសូលីណូអ៊ីត + សន្ទះបិទបើក + ឧបករណ៍ក្តាប់ខ្យល់
● អាយុកាលប្រើប្រាស់ច្រើនវដ្ត ស្របតាមស៊ីឡាំងប្រពៃណីជប៉ុន



ប៉ារ៉ាម៉ែត្រលក្ខណៈបច្ចេកទេស
ឧបករណ៍ក្តាប់ Z-EFG-100 មានភាពជាក់លាក់ខ្ពស់ គាំទ្រដល់ការក្តាប់ទន់ និងអាចក្តាប់វត្ថុផុយស្រួយដូចជាបំពង់ ស៊ុតជាដើម ដែលមិនអាចធ្វើបានដោយឧបករណ៍ក្តាប់ខ្យល់។
●ជំងឺដាច់សរសៃឈាមខួរក្បាលធំ។
●ការគ្រប់គ្រងខ្សែភ្លើង EIA485 ។
●សម្របខ្លួនទៅនឹងដៃមនុស្សយន្តជាច្រើនប្រភេទ។
| លេខម៉ូដែល Z-EFG-100 | ប៉ារ៉ាម៉ែត្រ |
| សរុប ដាច់សរសៃឈាមខួរក្បាល | ៩០មម |
| កម្លាំងក្តាប់ | ៣៥-៦០N |
| សមត្ថភាពធ្វើម្តងទៀតបាន | ±0.02មម |
| ទម្ងន់ក្តាប់ដែលបានណែនាំ | ០.៥គីឡូក្រាម |
| ការឆ្លង របៀប | វីស + នុយភ្ជាប់ |
| ការបំពេញបន្ថែមជាតិខ្លាញ់នៃសមាសធាតុដែលមានចលនា | រៀងរាល់ប្រាំមួយខែម្តង ឬ ១ លានដង/ដង |
| ពេលវេលានៃចលនាមួយផ្លូវ | 1s |
| ជួរសីតុណ្ហភាពប្រតិបត្តិការ | ៥-៥៥អង្សាសេ |
| ជួរសំណើមប្រតិបត្តិការ | RH35-80(គ្មានសាយសត្វ) |
| របៀបចលនា | ការតភ្ជាប់ |
| ការគ្រប់គ្រងជំងឺដាច់សរសៃឈាមខួរក្បាល | អាចលៃតម្រូវបាន |
| ការកែតម្រូវកម្លាំងគៀប | អាចលៃតម្រូវបាន |
| ទម្ងន់ | ០,៩២៥ គីឡូក្រាម |
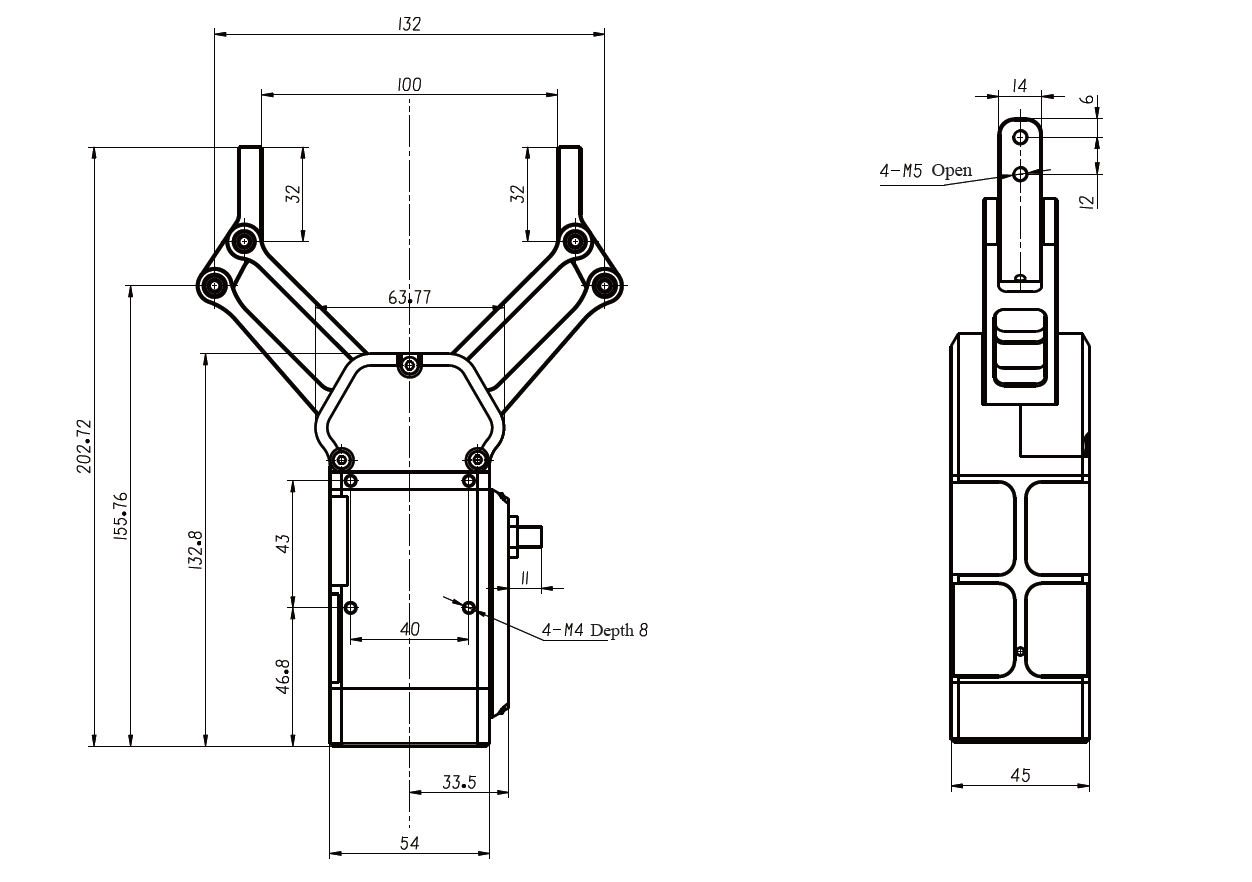
| វិមាត្រ(បណ្តោយ*ទទឹង*កម្ពស់) | ២០៣*១៤៤*៤៥មម (បើក) ២២២*៦៤*៤៥មម (បិទ) |
| ការដាក់ឧបករណ៍បញ្ជា | ភ្ជាប់មកជាមួយ |
| ថាមពល | ៣០វ៉ាត់ |
| ប្រភេទម៉ូទ័រ | ឌីស៊ីគ្មានជក់ |
| ចរន្តកំពូល | 1.5A |
| វ៉ុលដែលបានវាយតម្លៃ | 24V |
| ចរន្តរង់ចាំ | ០.២អា |
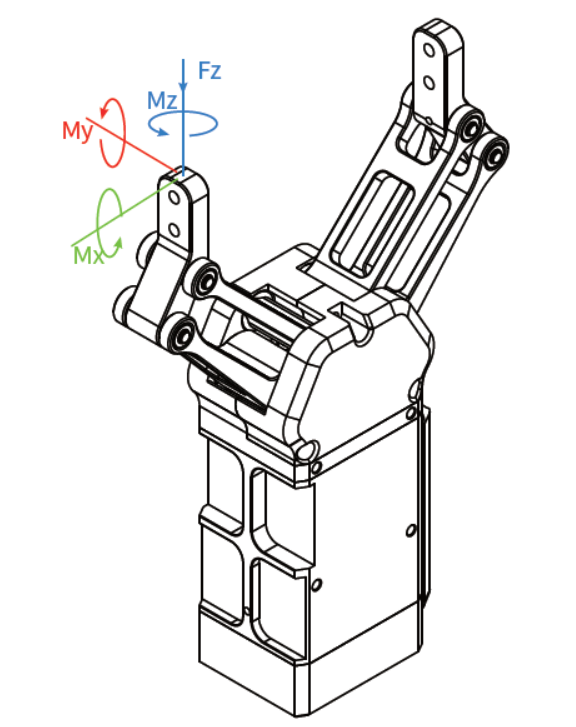
| បន្ទុកឋិតិវន្តដែលអាចអនុញ្ញាតបានក្នុងទិសដៅបញ្ឈរ | |
| ហ្វស៖ | ១៥០N |
| កម្លាំងបង្វិលជុំដែលអាចអនុញ្ញាតបាន | |
| ម.ស. | 2 ញូតុនម៉ែត្រ |
| របស់ខ្ញុំ៖ | ១.៥ ញូតុនម៉ែត្រ |
| ម.ស.៖ | ១.៥ ញូតុនម៉ែត្រ |
ដោត និងលេង ងាយស្រួលភ្ជាប់
ដើម្បីគាំទ្រដល់ការដោត និងលេងជាមួយដៃរ៉ូបូតសហការសំខាន់ៗ ឧបករណ៍ក្តាប់អគ្គិសនីមានប្រព័ន្ធ servo រួមបញ្ចូលគ្នា គ្រាន់តែត្រូវការមួយដែលអាចចាក់ឡើងវិញនូវស្នប់ខ្យល់ + តម្រង + សន្ទះបិទបើកម៉ាញេទិកអេឡិចត្រុង + សន្ទះបិទបើក + ឧបករណ៍ក្តាប់ខ្យល់។

ស្ត្រូកវែង ភាពឆបគ្នាដ៏អស្ចារ្យ
ចលនាដែលមានប្រសិទ្ធភាពរបស់ Z-EFG-100 អាចឡើងដល់អតិបរមា 100 មីលីម៉ែត្រ ទំហំនៃការបើក/បិទគឺ 10 មីលីម៉ែត្រ ផលិតផលនេះអាចប្រើសម្រាប់បន្ទះឈីបស៊ីមីកុងដុកទ័រ ផលិតផលឌីជីថល 3C រថយន្ត និងឧបករណ៍ប្រើប្រាស់ក្នុងផ្ទះជាដើម។
ទំហំតូច ងាយស្រួលរួមបញ្ចូល

ទំហំនៃ Z-EFG-100 គឺ L203 * W144 * H45 រចនាសម្ព័ន្ធមានទំហំតូច គាំទ្ររបៀបដំឡើងច្រើន ឧបករណ៍បញ្ជាត្រូវបានភ្ជាប់មកស្រាប់ គ្របដណ្តប់លើផ្ទៃដីតូច វាអាចបំពេញភារកិច្ចតោងផ្សេងៗ។


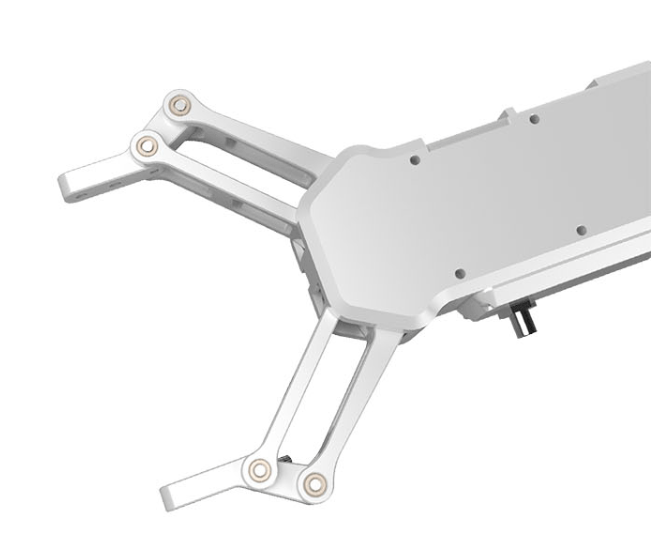
ការសម្របខ្លួនដោយខ្លួនឯងទៅនឹងការគៀប កន្ទុយអាចផ្លាស់ប្តូរបាន

ឧបករណ៍ក្តាប់អគ្គិសនី Z-EFG-100 គាំទ្រការគៀបសម្របខ្លួនដោយខ្លួនឯង វាអាចអនុវត្តបានកាន់តែច្រើនសម្រាប់វត្ថុរាងមូល រាងស្វ៊ែរ ឬវត្ថុរាងមិនប្រក្រតី កន្ទុយរបស់វាអាចត្រូវបានផ្លាស់ប្តូរបានយ៉ាងងាយស្រួល អតិថិជនអាចគៀបវត្ថុដែលពួកគេចង់បាន។
ការគ្រប់គ្រងកម្លាំងភាពត្រឹមត្រូវ

ឧបករណ៍ក្តាប់អគ្គិសនី Z-EFG-100 គឺដើម្បីទទួលយកការរចនាប្រអប់លេខពិសេស និងការគណនាការបើកបរដែលផ្តល់សំណង កម្លាំងគៀបរបស់វាគឺ 35N-60N ដែលអាចលៃតម្រូវបានជាបន្តបន្ទាប់ ហើយភាពអាចធ្វើម្តងទៀតបានរបស់វាមានរហូតដល់ ±0.02 ម៉ែត្រ។
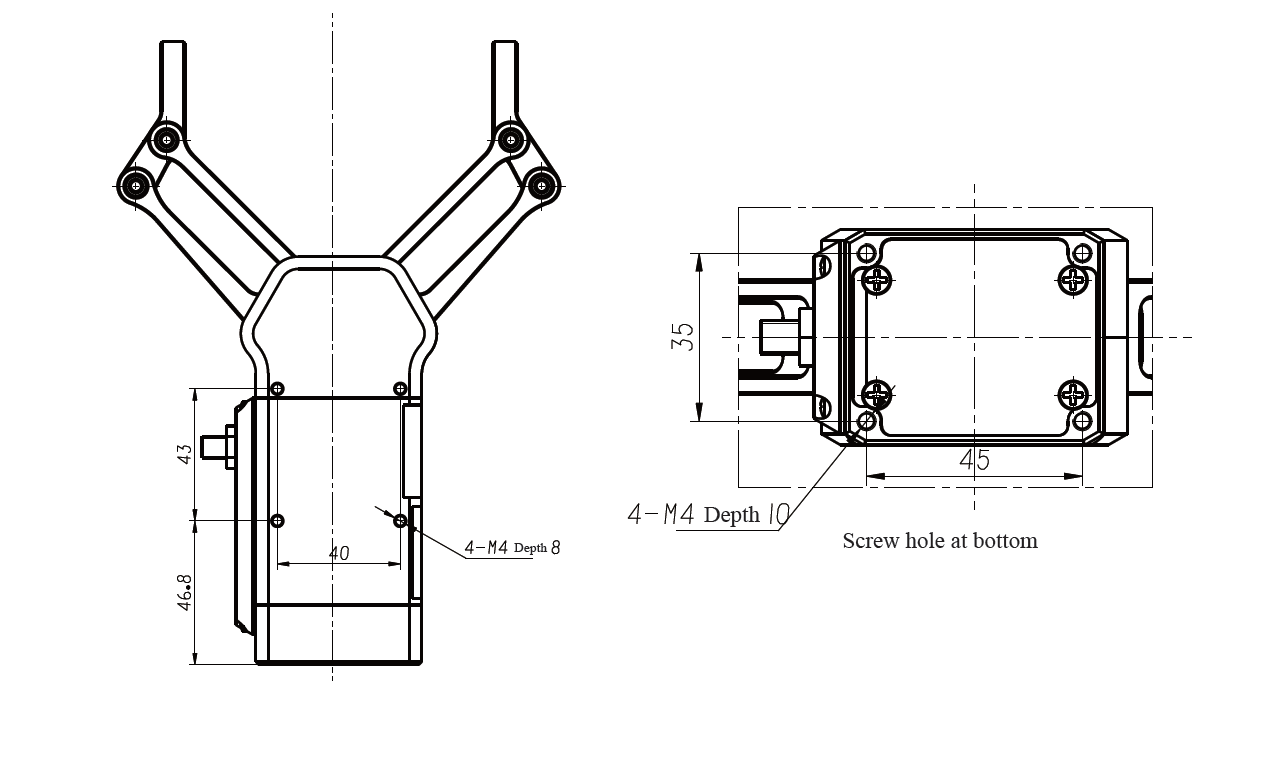
ដ្យាក្រាមដំឡើងវិមាត្រ
អាជីវកម្មរបស់យើង


ប្រភេទផលិតផល
-

HITBOT ELECTRIC GRIPPER SERIES - Z-EFG-12 Paral...
-

ម៉ាស៊ីនក្តាប់អគ្គិសនី DH ROBOTICS ស៊េរី CG – ...
-
-300x255-300x300.png)
ម៉ាស៊ីនក្តាប់អេឡិចត្រូនិច DH ROBOTICS ស៊េរី PGHL ...
-

ឧបករណ៍ក្តាប់អគ្គិសនី DH ROBOTICS ស៊េរី RGD –...
-

ឧបករណ៍ក្តាប់អគ្គិសនី DH ROBOTICS ស៊េរី PGE –...
-

ឧបករណ៍ក្តាប់អគ្គិសនី DH ROBOTICS ស៊េរី PGE –...